トルクや回転数によるモータの選定方法
皆さんはロボットを作成する際に、モータの選定に悩むことはありませんか。Jetson Nano 自律移動ロボットに用いているモータの選定を例としてまとめますので参考にしてください。
モータ選定の観点
下記の観点でモータを選定しています。
- 定格電圧
- 消費電流
- 出力軸の必要トルク
- 出力軸の必要回転数
各項目について、詳細を説明していきます。
定格電圧
用いようとしているバッテリおよびDC/DC等で、モータの定格電圧付近(超えてはいけません)の電圧を給電できるかを確認します。
私は11.1Vのバッテリおよび下記DC/DC(入力電圧:2.5~15V、出力電圧:2.5~15V)を用いることにしたため、定格電圧2.5V~15Vのモータを選定の候補としました。
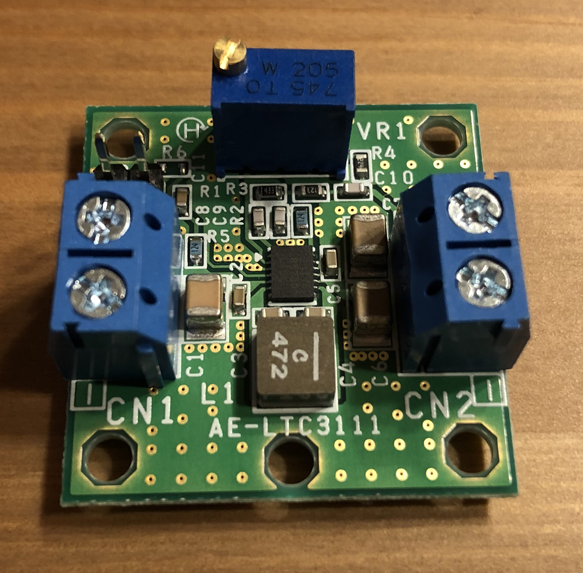
https://akizukidenshi.com/catalog/top.aspx
通販コード K-11212
11.1Vのバッテリは以前ロボコンで使用したものが余っていたため流用することにしました。
消費電流
モータを動作させた時、消費電流が流れることを想定して、その電流値が電源系の制限を満たすことを確認する必要があります。
例えば上記のDC/DCの最大出力電流は1.5Aとなっているため、モータに流れる電流はそれ以下に抑える必要があります。4輪のロボットではモータを4つ同時に動作させるため、1つの電源で4つのモータに給電する場合は、各モータを流れる電流は0.375A(= 1.5 / 4)以下に抑える必要があります。
つまり消費電流が0.375A以下となっているモータを選定すれば良いでしょう。
出力軸の必要トルク
ロボットを移動させるために必要なモータのトルクを計算します。
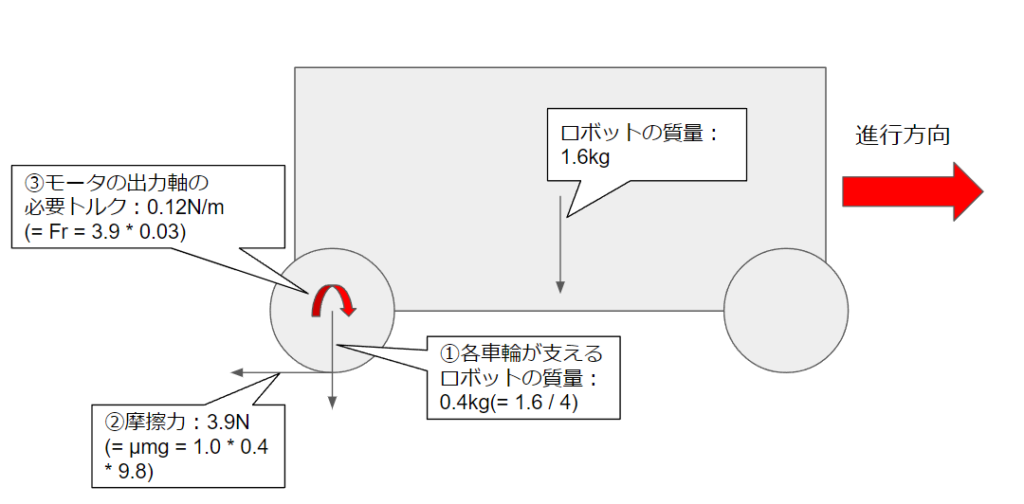
①ロボットの質量を大まかに予測し、車輪にかかる力を計算します。
私の場合モータやJetson Nano、バッテリー、センサ(カメラやLiDAR)、を合わせて約630g、ロボットの筐体で1kgとし、合計1.63kgと見積もりました(部品はまだ揃っていません笑)。そして4輪のロボットを考えているため、各車輪が支える質量は約0.4kg(=1.63 / 4)となります。
②ロボットが移動する際に車輪にはたらく摩擦力(=μmg)を計算します。
私の場合、摩擦係数(μ)は1.0としました。今回車輪表面の素材はゴムにしようと考えており、最終的には野外で移動させたいですが、それまでは机の上などでデバッグするため、ほとんど滑らないと考えられるからです。
μ = 1.0とした場合、摩擦力は3.9N(μmg = 1.0 * 0.4 * 9.8)となります。
③上記で求めた摩擦力をトルクに換算します。つまり先ほど求めた摩擦力以上のトルクがモータで出力できれば、ロボットを動作させることができるということです。
トルクを求める場合には車輪半径を定める必要があるため、おおよそモータのメーカを決めて、どの程度の車輪を使用するか検討する必要があります。
私の場合、リーズナブルなエンコーダ付きのDCモータの購入を考えており、ロボショップ(https://www.robotshop.com/jp/ja/)で購入できるPololu社のモータの中から選定しようと考えていたため、Pololu社の車輪(下記参照)を使用することにしました。

そもそもPololu社のモータにしようとした理由は、「エンコーダ付き ギアモータ」などで検索した際にヒットした中で、リーズナブルだったからです。
上記の車輪半径は30mm(0.03m)であるため、モータの出力軸で必要なトルクは約0.12N/m(T = Fr = 3.9 * 0.03)となります。
つまり0.12N/m以上のトルクを出力できるモータを選定すれば良いこととなります。
出力軸の必要回転数
トルクともう一つ重要であるのが、回転数です。モータの必要回転数はロボットの移動速度から求めます。
私の場合、自律移動ロボットは移動速度にこだわってはいないため(レーシング用ではないため)、希望する移動速度を0.1m/sとして計算を行いました。
移動速度を定めたら、ω = v / rより、回転数を求めます。先ほどの半径0.03mの車輪を用いる想定のため、回転数は
31.8rpm(= 60 * 0.1 / (2 * 3.14 * 0.03))となります。
つまりモータの回転数が31.8rpmを超えていれば、ロボットは0.1m/s以上の速度で移動が出来ることとなります。
選定したモータ
以上の条件を下記にまとめます。
- 定格電圧:2.5~15V
- 消費電流:0.375A以下
- 出力軸の必要トルク:0.12N/m以上
- 出力軸の必要回転数:31.8rpm以上
上記の条件を満たすモータを見つけました。
図4の「エンコーダ付き6V 210:1 75RPMマイクロメータギアモータ」です。
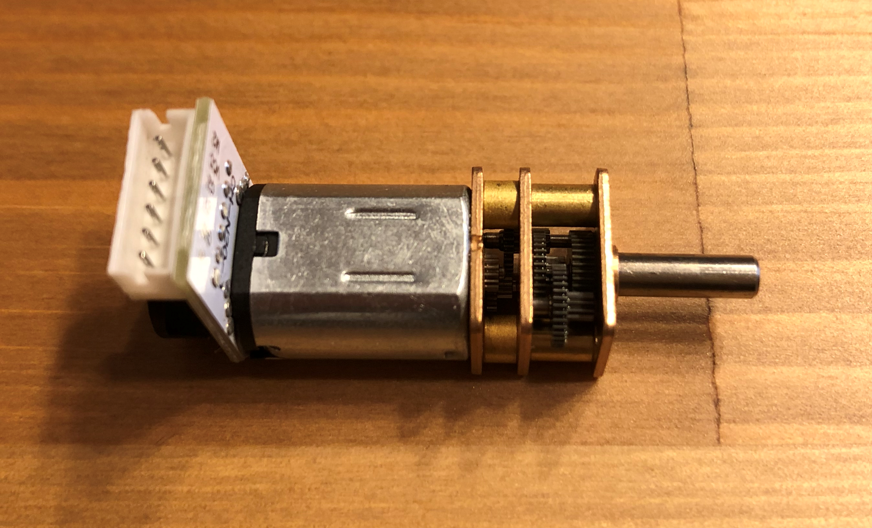
下記の仕様となっています。
- 定格電圧:6V
- 消費電流(定格電流):0.170A
- 出力軸の定格トルク:0.13N/m(1.4 kg.cm)
- 出力軸の定格回転数:42rpm
すべて選定条件を満たしていることが分かりますね。しかもエンコーダ付きであるため、回転角度を把握することができます。また、小型(1cm * 1.2cm * 4cm程度)であり、減速のためのギアが見えるのも格好良くて好きです(笑)。
まとめ
「定格電圧」、「消費電流」、「出力軸の必要トルク」、「出力軸の必要回転数」の4つの観点でモータの選定条件を考え、それに従いモータの選定を行いました。
モータを選定される際はぜひ参考にしてください。