令和6年度秋季 エンベデッドシステムスペシャリスト合格体験記
コンテンツプロフィール勉強方法午前I、午前Ⅱ参考Webサイト・アプリ参考書籍午後Ⅰ午後Ⅱ①良い論述の書き方が分かっていない②エンベデッドシステムスペシャリストの過去問にあるような経験ができていない試験当日午前I午前Ⅱ午後 […]
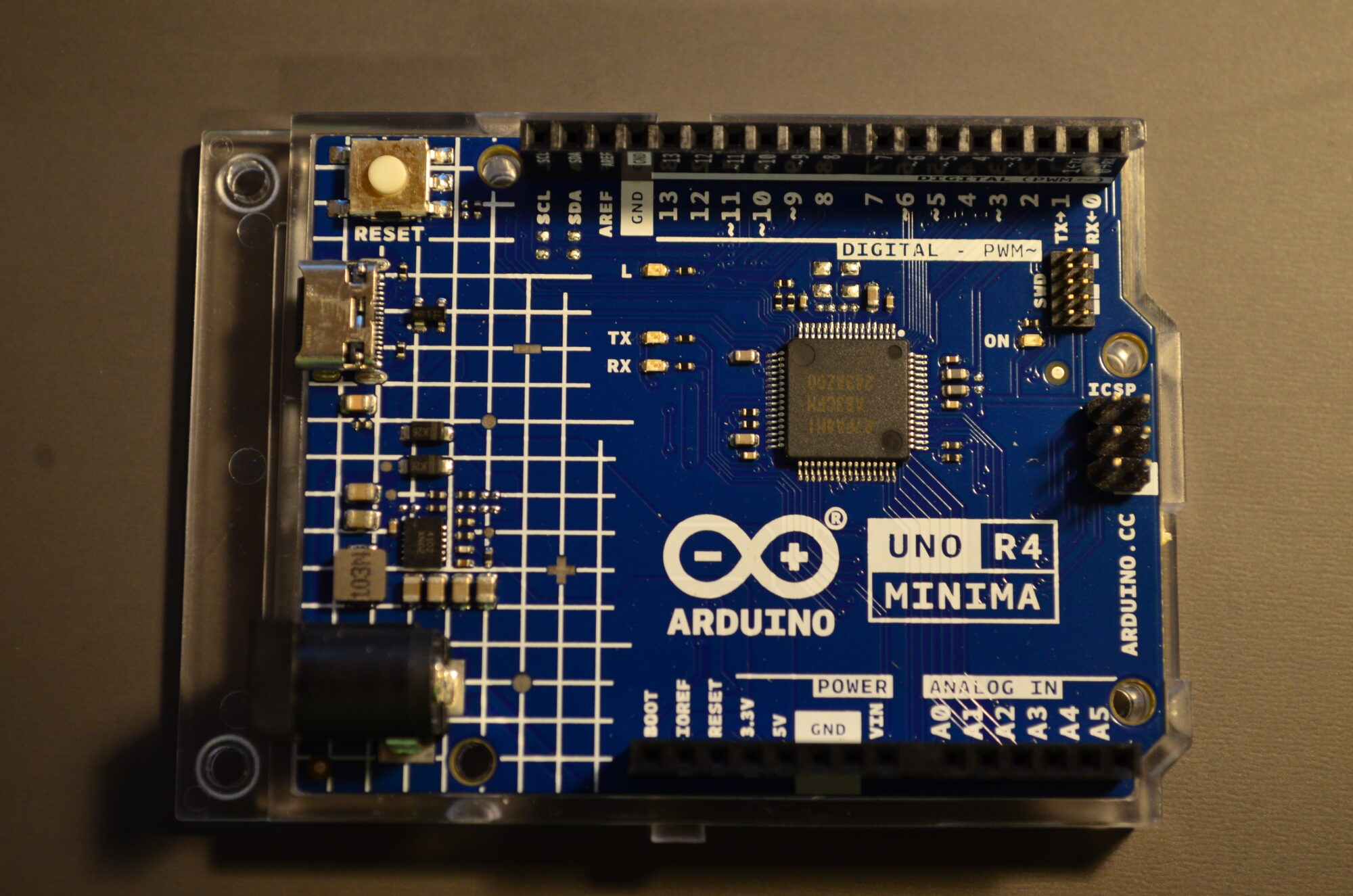
Arduino UNO R4 MinimaでLチカ
2023年6月にArduino UNO R4 Mimimaが発売されました。Arduino UNO R3は2012/6発売でしたので、11年ぶりのバージョンアップとなります。 R3からの変化点は別のサイトで説明されている […]
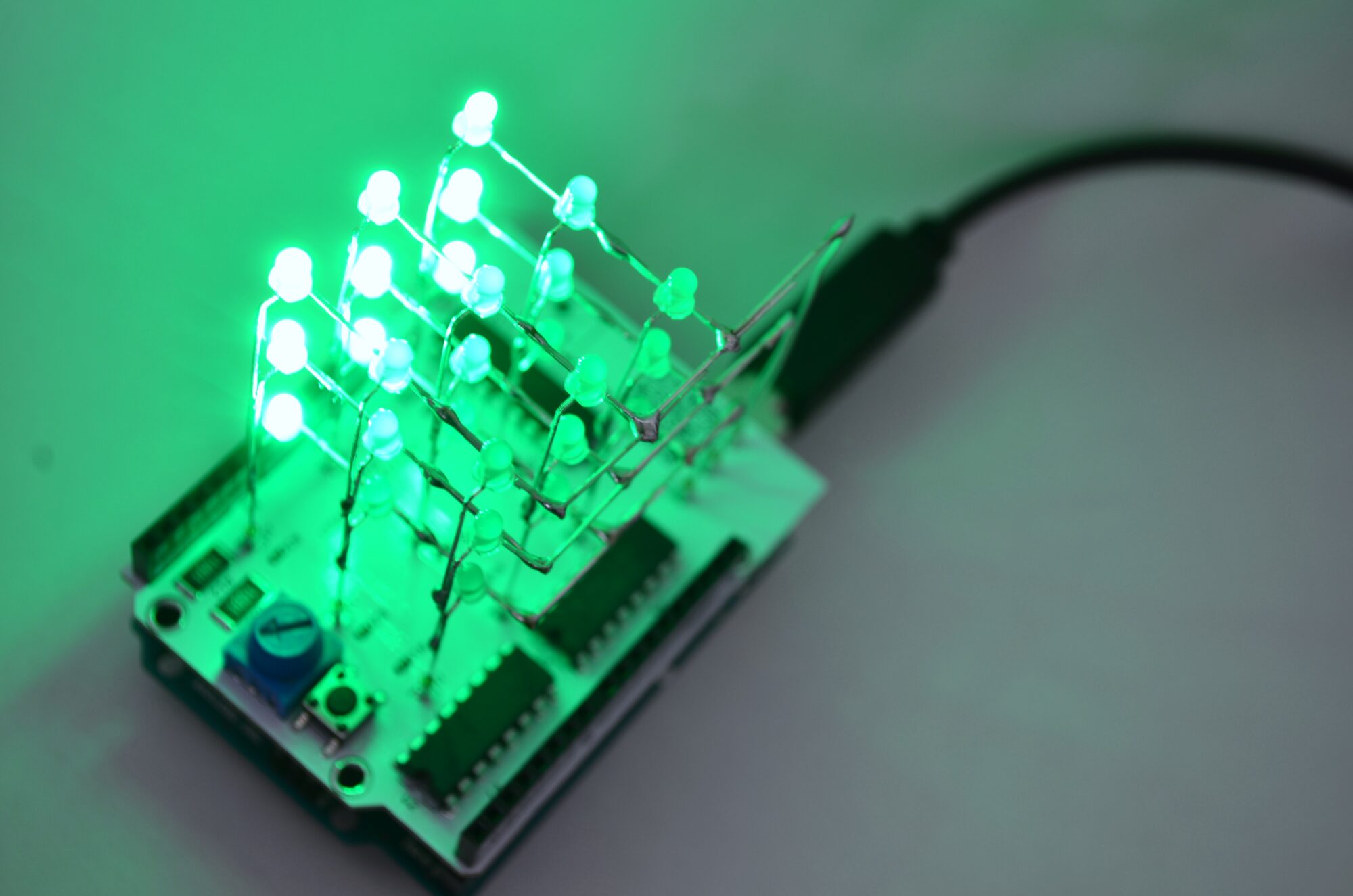
Arduino Uno用 LED Cube Shieldキット
コンテンツ商品ページ リンク紹介動画本商品の特徴【特徴1】作業時間の大幅短縮【特徴2】手軽にプログラミング【特徴3】機能拡張性【特徴4】見栄え注意事項仕様内容物作業手順ShieldLED Cube回路図LED部電流増幅部 […]
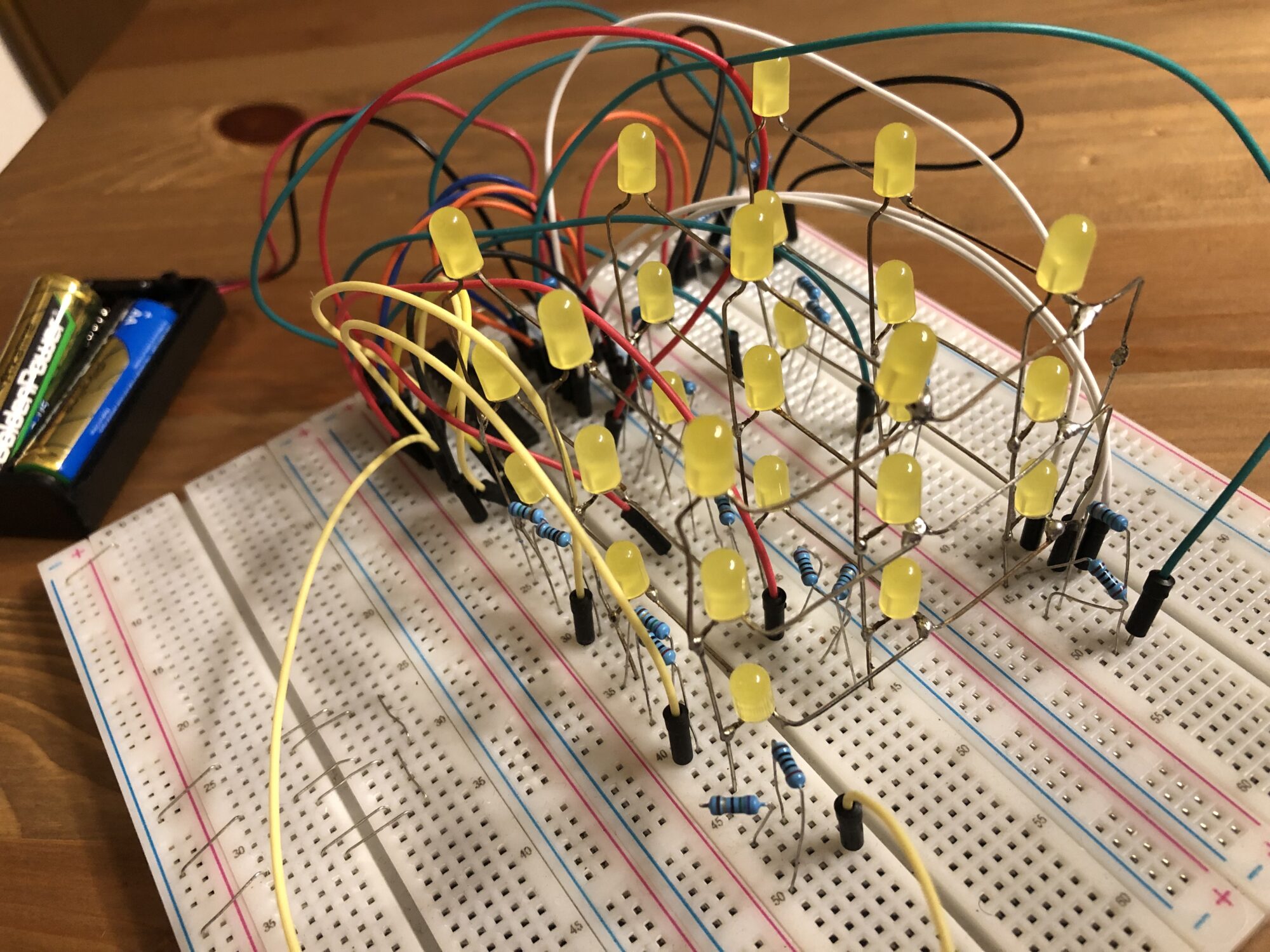
LED Cube作成② 【失敗】ダイナミック点灯型LED CubeのHW設計、実装、動作確認
コンテンツダイナミック点灯型 LED Cubeの作成HW設計LED点灯(照度調節)回路点灯速度制御機能割り込み・点灯パターン選択回路ソフトウェア設計実装・動作確認まとめ ダイナミック点灯型 LED Cubeの作成 前回シ […]
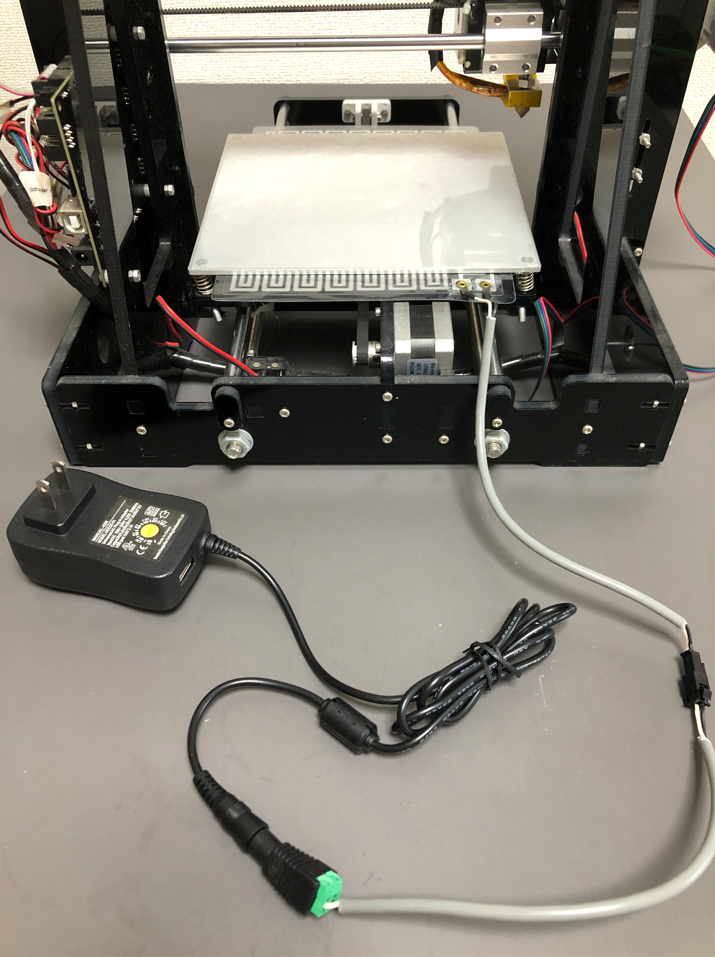
3Dプリンター(ALUNAR M518)のベッドをヒートベッドに改造する
以前自律移動ロボットの試作機を作成しましたが、見た目を格好良くしたいため、アルミでボディを作成しなおすことにしました。 そのためにアルミの加工が必要で、ミニテーブルソーでアルミを切削しようと考えています。 ミニテーブルソ […]
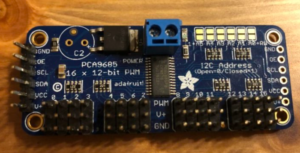
PCA9685およびTB67H450FNGの使い方
~4輪ロボットのモータ制御~
Jetson Nanoを用いた自律移動ロボットの作成を目指し、PCA9685およびTB67H450FNGを用いてモータ制御を行っていきます。 TB67H450FNGを用いたモータ制御(正回転、逆回転のPWM出力)をするた […]
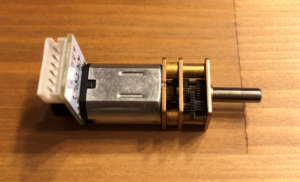
トルクや回転数によるモータの選定方法
皆さんはロボットを作成する際に、モータの選定に悩むことはありませんか。Jetson Nano 自律移動ロボットに用いているモータの選定を例としてまとめますので参考にしてください。 コンテンツモータ選定の観点定格電圧消費電 […]
プログラムのライセンス・著作権について
プログラムを公開するにあたって、コピーレフト、コピーライト、コピーセンターに関して学んだので、備忘録として残しておきます。 コピーライトとコピーレフト ライセンスというものはコピーライトとコピーレフトに大別されます。コピ […]

Jetson Nano GPIO動作確認
最終的にはJetson Nanoを用いてロボットを制御したいため、今回はGPIOの動作確認(デジタル入出力、PWM出力)をしようと思います。 コンテンツ①Lチカ(1秒点灯)②Lチカ(スイッチ入力)③モータ(PWM制御)ま […]
自律移動ロボット作成予定
最近使用しているPCの様子がおかしく、もう4年も使用しているため、新しいPCを購入することにしました。良いきっかけなので、本格的に自律移動ロボットの作成を始めていこうと思います。 最終的にどのようなものが作りたいか、まだ […]