PWM
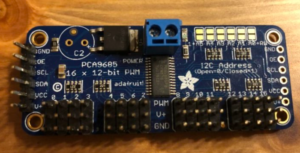
PCA9685およびTB67H450FNGの使い方
~4輪ロボットのモータ制御~
2022年2月27日
Jetson Nanoを用いた自律移動ロボットの作成を目指し、PCA9685およびTB67H450FNGを用いてモータ制御を行っていきます。 TB67H450FNGを用いたモータ制御(正回転、逆回転のPWM出力)をするた […]

Jetson Nano GPIO動作確認
2021年12月12日
最終的にはJetson Nanoを用いてロボットを制御したいため、今回はGPIOの動作確認(デジタル入出力、PWM出力)をしようと思います。 ①Lチカ(1秒点灯) Jetson Nanoのデジタル出力を確認するために、L […]